Modelling Driver Behaviour in a Connected Environment
Modeling Driver Behavior in a Connected Environment Connected and autonomous vehicles will change the future of our surface transportation system by enhancing safety, improving mobility, reducing energy consumption, and controlling emissions. The real-time information provided by Connected Vehicles Technology (CVT) allows drivers to become more aware of their surrounding traffic condition and to maneuver safely and more efficiently. Unfortunately, the available simulation frameworks, in general, are not capable of modeling the behavior of connected and autonomous vehicles and cannot be used to evaluate the impacts of these technologies on the transportation system. Therefore, there is a need for a comprehensive simulation framework to model driver behavior in a connected driving environment. Motivated by these limitations in modeling frameworks, the main objective of this dissertation is to develop a framework to systematically capture the changes in driver behavior in a connected driving environment with regular, connected, and autonomous vehicles.
Accordingly, the main focus of this research is on the following aspects: (i) to characterize the changes in driver behavior in a connected driving environment with autonomous, connected, and regular vehicles, (ii) to investigate connectivity in the communications network and its impacts on the driving environment.
Publications
Talebpour, A., H. S., Mahmassani, S. H., Hamdar. "Modeling Lane-Changing Behavior in a Connected Environment: A Game Theory Approach.", Transportation Research Part C: Emerging Technologies,Vol. 59, 2015, pp. 216-232.
Talebpour, A. and H. S. Mahmassani "Influence of Autonomous and Connected Vehicles on Stability of Traffic Flow." 94th Annual Meeting of the Transportation Research Board, Washington D.C., January 11-15, 2015.
Talebpour, A., H. S., Mahmassani, S. H., Hamdar. "Speed Harmonization: Effectiveness Evaluation under Congested Conditions."Transportation Research Record: Journal of the Transportation Research Board of National Academies,No. 2391, 2013, pp. 69-79.
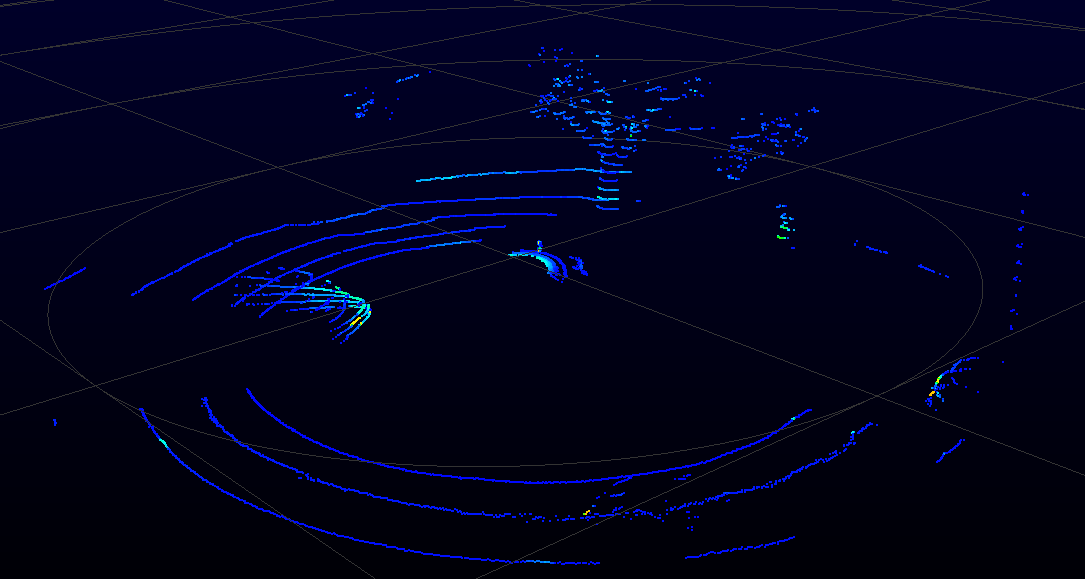
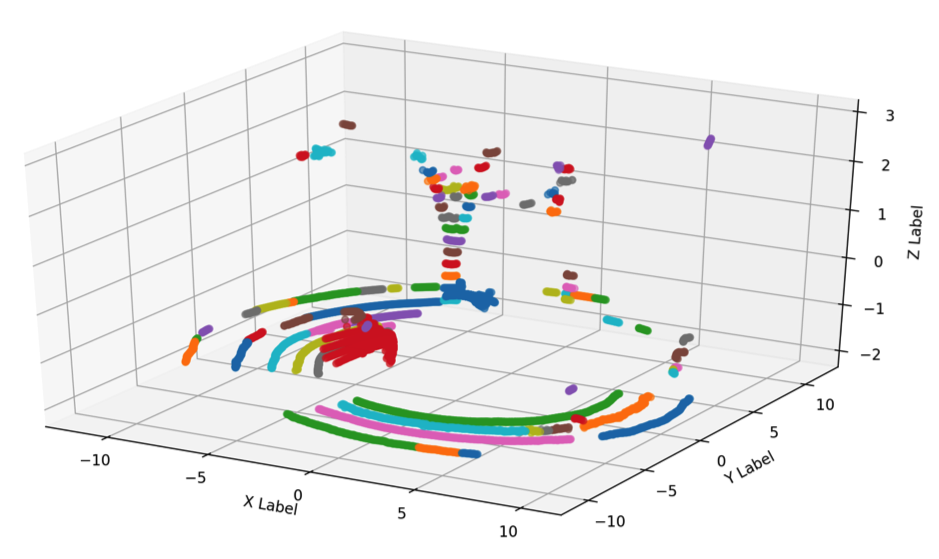
LiDAR Based Object Detection
One of the key components of the sensing system of autonomous vehicles is the LIDAR system that provides real-time and accurate 3D mapping of the environment. The LIDAR system collects an enormous amount of data every 30 to 100 milliseconds that is quite challenging to analyze in a timely manner. The objective of this study is to propose a new method to efficiently analyze the data collected from the LIDAR system and to extract the relevant information to control the autonomous vehicle. In this method, the LIDAR data points are clustered to identify and to locate the important objects such as vehicles, bikes, and pedestrians that directly affect the steering and brake, while ignoring the irrelevant information. The proposed algorithms borrow the concepts of conventional clustering algorithms, such as DBSCAN and Affinity Propagation, but in a purpose-oriented manner that improves the speed of the algorithm. The data collected from the actual driving is used to evaluate the performance of the proposed method in identifying cars, bikes, and pedestrians.
Collaborative Left Turn Maneuver
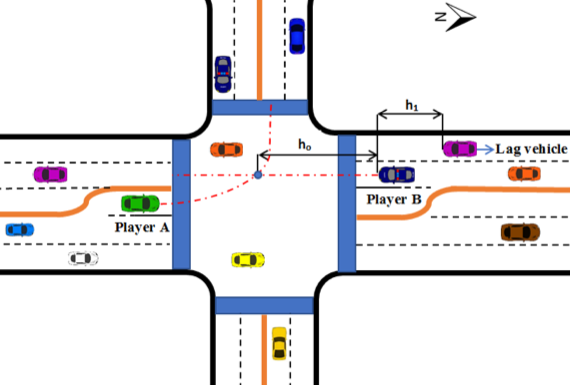
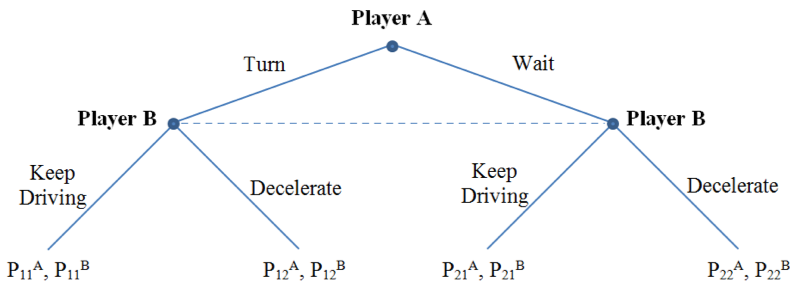
Connectivity and automation provide the opportunity to enhance safety and mitigate congestion in transportation systems. In fact, these technologies can enhance the efficiency of drivers/vehicles’ decision-making by managing and coordinating the interactions among human-driven and connected, automated vehicles. Such management and coordination can lead to developing a collaborative connected, automated driving environment. Game theory, as a methodology to model the outcome of the interactions among multiple players, is a perfect tool to characterize the interactions between these vehicles.
One of the most challenging maneuvers to model is drivers/vehicles’ tactical decisions at intersections. Focusing on unprotected left turn maneuvers, we aim at developing a game theory based framework to characterize driver behavior in unprotected left turn maneuvers in a connected, automated driving environment. A two-person non-zero-sum non-cooperative game under complete information is selected to model the underlying decision-making. NGSIM data is used to calibrate the payoff functions based on Maximum Likelihood Estimation. Validation results indicate that this framework can effectively capture vehicle interactions when performing conflicting turning movements while achieving a relatively high accuracy in predicting vehicles' real choice.
Publications
Rahmati, Y., and A., Talebpour. Towards a Collaborative Connected, Automated Driving Environment: A Game Theory Based Decision Framework for Unprotected Left Turn Maneuvers, IEEE Intelligent Vehicle Symposium (IV), Redondo Beach, CA, June 11-14, 2017.